本研究是微型渦輪鉆井技術在黏土層中應用的首例有記錄現場試驗,試驗井為德國馬爾地區一口套管尺寸5.5英寸(13.97厘米)的已下套管井筒。本次作業的委托方為一家運營商,其業務范圍包括對大魯爾區上覆地層含水層的監測工作。開展本次作業的核心目的,是為后續水力試驗提供基礎條件,以測定埃姆舍組地層的垂向滲透率——目前該地層的垂向滲透率尚無精準數據支撐。
微型渦輪鉆井技術是一種創新鉆井工藝,可從已有井筒向周圍巖層鉆進微型分支井眼。這類長度為數米的微型分支井眼,能夠搭建起巖層與主井筒之間的連通通道。本項目選取一口深度達1161英尺(354米)的井筒,分別在951英尺(290米)和1083英尺(330米)這兩個指定深度位置施工,共鉆進6口微型分支井眼,各井眼之間呈均勻的60°夾角分布。該新型鉆井工藝的核心創新點之一,在于可在單一作業工序內同步完成鋼套管鉆進與地層鉆進作業。
介紹
德國魯爾區仍面臨著近兩個世紀煤炭開采帶來的長期環境影響。這些被稱為“長期性任務”的工作,包括防止礦井水不受控制地上升,以及避免其與淺層含水層混合——該淺層含水層為該地區約500萬居民提供飲用水。
礦井水中富含鹽分、金屬及其他污染物,持續在廢棄地下采空區積聚,必須通過人工抽水排至地表,以防止采空區積水倒灌并保護地下水水質。魯爾區每年抽排的礦井水量約達7000萬立方米,這使其成為一項規模龐大且需長期應對的挑戰。
實現礦井水可控管理的關鍵因素之一,是上覆地層的密封能力。其中,厚度較大的黏土層——埃姆舍組地層,是分隔礦井水與淺層飲用水含水層的主要水力屏障。盡管早期試驗已證實該地層滲透率較低,但關于其垂向滲透率的完整數據仍較為匱乏。而這一參數對于“在不影響地下水保護的前提下,礦井水位可提升至何種程度”的決策制定至關重要。
為獲取更多關于垂向滲透率的相關數據,研究團隊于2019年在德國馬爾市附近鉆成一口深井,井深達1165英尺(355米)(見圖1)。原本計劃通過封隔器測試測定埃姆舍組地層上部的垂向滲透率。
基于這一測試目的,該井筒預先在兩段井段安裝了濾水管:一段位于591英尺(180 米)至869英尺(265米)井段,另一段位于1132英尺(345米)至1148英尺(350 米)井段。測試計劃為:在兩段濾水管之間下入單只封隔器,隨后對封隔器下方井段進行注水作業,以此建立水力梯度。通過監測封隔器上方水位,并持續觀測封隔器下方的壓力上升過程,即可據此推斷埃姆舍組上段地層的垂向透水性能。
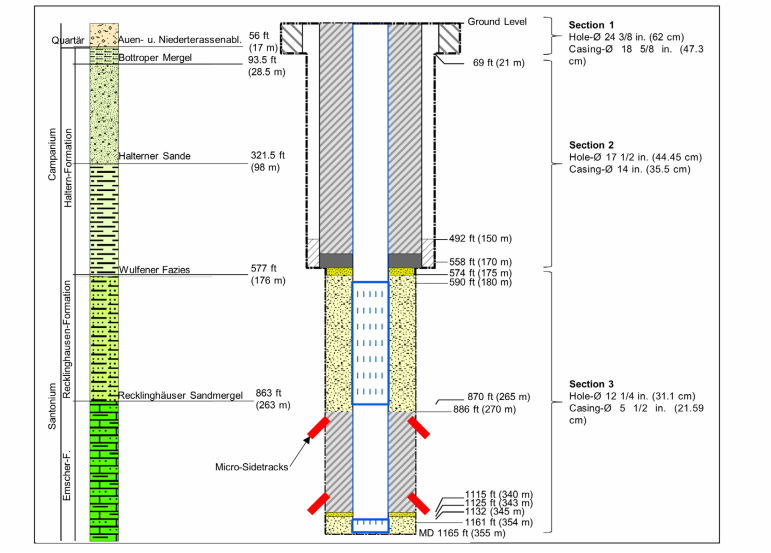
圖1 德國馬爾市 2 號井鉆井設計與完井方案。圖中藍色條紋矩形代表濾水管井段,紅色線條為微型側鉆分支井眼的布設位置(馮?克萊因佐根,2021)。
然而在套管固井施工期間,下部濾水管意外被水泥封固,井筒與地層的連通性完全喪失,該井段就此失去使用功能。為重新建立井筒與地層的連通通道,需在目標地層處鉆設新的連通孔道。
基于這一需求,研究人員計劃在埃姆舍組地層內部的兩個指定深度,分別設置兩個獨立的測試層位。為此,項目選用了前文《微型渦輪鉆井技術》章節所述的新型微型渦輪鉆井技術。
從理論層面而言,油氣行業現有的多項鉆井及完井成熟技術,均具備重建井筒-地層連通性、支撐水力測試開展的能力。但綜合考量技術獨特優勢、成本效益與設備可獲得性后,最終選定微型渦輪鉆井技術。下文將對部分曾納入考量范圍的替代技術方案,進行簡要說明。
正如貝爾曼等人、任璞及劉等人所述,套管射孔技術或許是實現儲層與井筒連通最常用的完井工藝。該技術在油氣鉆井領域的應用,是通過射孔槍在井筒鋼套管及水泥環上制造射孔通道,使儲層中的油氣能夠流入井筒。射孔作業通常借助配備聚能射孔彈的射孔槍完成,射孔彈引爆后產生的高速射流可穿透套管、水泥環及儲層巖石。射孔槍的射孔深度通常在6英寸至48英寸(15厘米至122厘米)之間,單次下井作業即可完成數百個射孔的施工。
套管段銑技術是一種從井筒內切除某一段鋼套管的工藝。作業時,將專用段銑工具下入井內,通過工具旋轉磨削,去除指定井段的套管。該技術常用于需要建立與地層連通通道的施工場景,例如油井棄置、側鉆作業,或是為開展測試、恢復產能而重建井筒 - 地層連通性的工程。套管段銑作業會切削套管本體,造成套管強度削弱,使其承受井下應力的能力下降。該工藝還可能損壞套管外的水泥環,進而破壞層間封隔效果,甚至形成流體竄流通道。徑向噴射鉆井技術(RJD)是一種利用高壓流體射流在儲層中鉆出徑向分支井眼,以提高油氣產量的鉆井方法。由于射穿套管與鉆進儲層地層的作業要求不同,徑向噴射鉆井需分兩次下井作業完成。第一次下井時,下入段銑工具組合,對鋼套管實施機械切削開孔。這一步驟必不可少,原因在于高壓噴射工具本身無法穿透鋼制套管。套管開窗完成后,便形成了一條從套管內部通往地層的通道。起出段銑工具組合后,進行第二次下井作業,下入高壓噴射工具。
該工具借助高壓流體射流切削出徑向分支井眼,延伸至儲層巖石內部。徑向噴射鉆井技術通常適用于巖性相對較軟的地層,在花崗巖等堅硬巖層中則難以鉆進。據黃氏兄弟研究,該技術的適用溫度上限通常約為248華氏度(120攝氏度)。
魚骨狀鉆井技術是一項用于提高油氣采收率的創新性儲層改造工藝。利用該技術可在井筒周圍巖層中鉆出多條呈魚骨形態分布的微型分支井眼,這些分支井眼穿透儲層后,能夠增大井筒與地層的接觸面積,提升油氣滲流效率。該技術體系采用專用的“針狀”鉆具,通過噴射或鉆進方式形成分支井眼,無需開展水力壓裂作業,單次下井即可完成數百條分支井眼的施工。
射孔鉆井一體化技術(Perfbore)是一種將套管射孔與儲層鉆進工序合二為一的新型鉆井改造技術。該技術的核心裝備為一套搭載于固定式管柱的超小型容積式馬達,配套小尺寸鉆頭。單井段一次施工即可鉆出4條長度達49英尺的徑向通道,無需使用炸藥或進行壓裂作業,即可實現儲層接觸面積與滲流效率的雙重提升。整套工具通過連續油管下入井內作業。
微型渦輪鉆井技術
微型渦輪鉆井技術可從主井筒向周圍地層鉆進額外的分支井眼,即所謂的微型分支井眼(見圖2)。該技術的核心部件是一臺由加壓流體驅動的高轉速微型渦輪。
微型側鉆分支井眼的鉆進流程如下:首先借助工作管柱,將導向靴下入井筒并完成安裝;隨后將與軟管相連的渦輪裝置,通過工作管柱下入井內,直至抵達導向靴位置。導向靴會使渦輪裝置偏離主井筒軸線,之后通過軟管向渦輪施加壓力,啟動鉆井作業。隨著鉆進作業的推進,軟管需持續向井內輸送,保障鉆井過程不間斷。
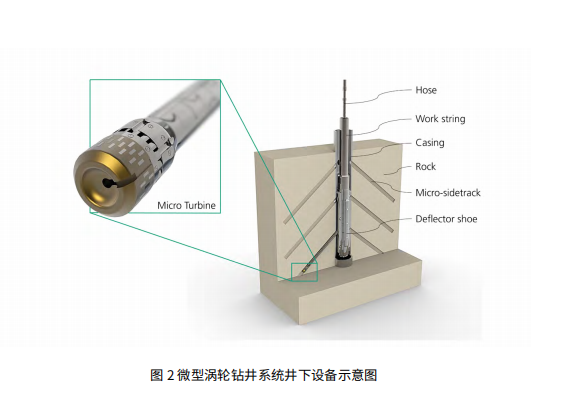
圖2 微型渦輪鉆井系統井下設備示意圖
該微型渦輪的工作原理為沖擊式渦輪原理。渦輪總長5厘米,外徑0.036米。圖3a展示了該渦輪的剖面圖,相關圖示內容已刊載于專利申請文件中(蓋斯勒,2021)。圖中箭頭標示出驅動流體(F)在渦輪殼體(2)內的流動路徑。
該渦輪的主體結構包含一個殼體(2),殼體內安裝有一根驅動軸(6),驅動軸可繞縱向軸線(X)旋轉。驅動流體(F)通過連接在渦輪尾部(8)的柔性軟管管路注入殼體(2)內部。殼體(2)內設有一條主供液管路(9),該管路分叉形成多條分支供液管路(10)。每條分支供液管路(10)均通過一個分流接口(41),進一步分為驅動管路(12)與回流管路(11)。回流管路(11)延伸至殼體(2)后側的回流口(18),從回流口流出的部分流體(

)會產生沿縱向軸線(X)方向的回推力(

),該推力的軸向載荷約為150牛。
主供液管路(9)通過一條連接管路(13)與軸承腔(16)相連,軸承腔(16)內安裝有用于支撐驅動軸(6)的軸承(37)。驅動流體(F)的部分支流

可對軸承腔(16)實現沖洗與冷卻。驅動軸(6)內部加工有中心通孔(25),該通孔貫穿渦輪葉輪(3),并在沖洗出口(40)處開口。渦輪葉輪(3)通過輪轂-軸連接結構(24)與驅動軸(6)同軸固定。在渦輪葉輪(3)的前端,設有用于安裝鉆頭的連接接口(23)。從沖洗出口(40)流出的驅動流體支流(

),可對鉆頭工作面起到冷卻降溫與巖屑清理的作用。
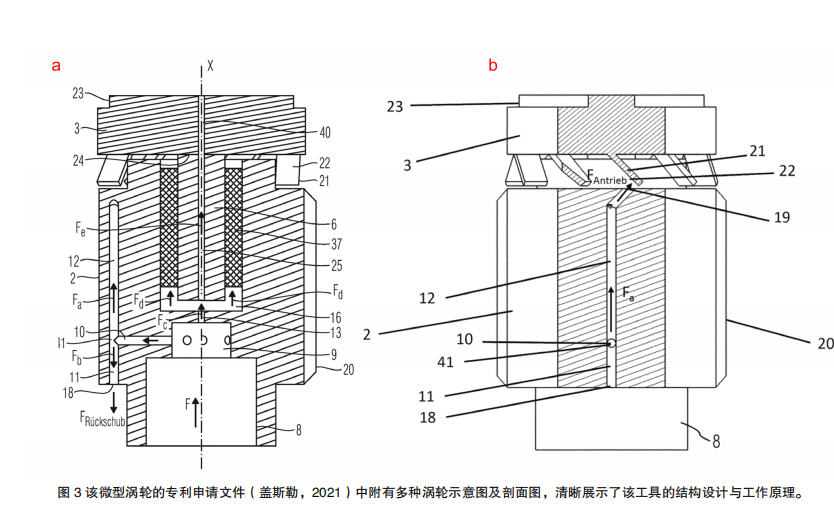
圖3 該微型渦輪的專利申請文件(蓋斯勒,2021)中附有多種渦輪示意圖及剖面圖,清晰展示了該工具的結構設計與工作原理。
圖3b為該渦輪其中一條驅動管路的剖面視圖。驅動流體(

)從主供液管路(9)流出,經分支供液管路(10)與分流接口(41),流入多條沿殼體(2)圓周方向布設的多條驅動管路(12)。每條驅動管路(12)均延伸至殼體(2)前端的驅動噴嘴(19)處并終止。從驅動噴嘴(19)噴出的射流,直沖渦輪葉輪(3)上葉片(21)的葉面(22),進而產生扭矩,帶動渦輪葉輪(3)、驅動軸(6)及鉆頭以相同角速度旋轉。當射流沖擊葉片(21)時,流體速度方向會沿葉面(22)輪廓發生改變,并最終從工具側面排出。射流的沖擊能可對整個系統施加約10牛?米的扭矩。該工具的空轉轉速可達50000轉/分鐘以上。殼體(2)的圓周上還設有若干導向肋條(20),用于確保渦輪在井筒內的穩定導向。渦輪葉輪(3)采用外露式設計安裝于殼體(2)之上,即葉輪未被側壁徑向封閉,驅動流體及其攜帶的巖屑可由此自由排出。
該渦輪配備有孕鑲金剛石鉆頭。前期試驗表明,鑒于渦輪高轉速下扭矩較低的特性,必須采用這類切削強度溫和的鉆頭,以防出現渦輪失速問題。
孕鑲金剛石鉆頭的切削體由硬質合金胎體構成,人造金剛石顆粒在燒結工序中嵌入胎體內部。此類鉆頭尤為適用于高轉速鉆井作業,其破巖機理可描述為研磨破碎。鉆井過程中,鉆頭表面脫落的金剛石碎屑會嵌入待鉆地層巖體,實現微小巖屑的剝離。有數據顯示,采用該鉆頭鉆進花崗巖地層時,粒徑10微米的巖屑占比峰值可達0.08%。如圖2所示,該鉆頭設計為輕微凹面形態,以提升鉆進過程中的導向穩定性。由于采用金剛石作為切削元件,該鉆頭可在單一作業工序內同時完成鋼材銑削與巖層鉆進,無需在施工過程中更換鉆頭,同時還可鉆進花崗巖、石英巖等極堅硬地層。微型渦輪鉆井系統的所有部件均具備耐溫性能。
在馬爾市的作業開展之前,微型渦輪鉆井技術已在德國與瑞士的科研井中成功完成現場應用。多個科研項目驗證,該技術可實現對火成巖、變質巖等超堅硬巖層的鉆進以及套管的鉆穿作業,鉆出的微型側鉆分支井眼能夠成功搭建起主井筒與周圍地層的連通通道。實踐證明,借助微型側鉆分支井眼縮小井筒附近的壓降,可有效增大井筒的有效半徑,提升地層流體向井筒的滲流能力。
截至目前,微型渦輪鉆井技術尚未在小直徑套管井及膨脹性黏土地層中得到應用。小直徑套管井作業的難點在于,套管內可供渦輪從主井筒軸線轉向水平方向的空間十分有限。在本項目中,受5.5英寸套管的限制,渦輪的偏轉角度被限定為60°。同時,技術團隊也無法確定該鉆井技術能否在黏土介質中有效運行。微型渦輪鉆井技術采用研磨方式破巖,其最初的設計應用場景為堅硬的結晶巖地層,而本項目的目標之一,就是驗證該技術是否同樣適用于松軟、高黏性的黏土層鉆進作業。鉆進黏土地層時還面臨一項全新挑戰——黏土遇水易發生膨脹,這一問題在以往的微型渦輪鉆井應用中從未出現過,屬于技術應用中的未知難題。
相較于其他完井技術,微型渦輪鉆井技術的創新點與優勢可歸納如下:該技術支持井筒重入作業,能夠在已鉆成的微型側鉆分支井眼內開展后續的檢測、修井或增產作業。套管銑削與地層鉆進兩道工序可通過同一套工具連續完成,大幅提升整體施工效率。與其他完井技術相比,該技術的鉆進深度更大,且鉆出的井眼直徑相對較粗,有助于提升地層流體向井筒的滲流能力。渦輪驅動的機械研磨式破巖機理,使其可實現對堅硬結晶巖地層的鉆進作業,進而拓寬技術的巖性適用范圍。同時,研磨作用能形成光滑穩定的井壁,為井筒重入作業提供必要條件;此外還可降低井壁坍塌風險,提高井眼整體穩定性。借助陀螺儀,可實現導向靴的精準定位,確保微型側鉆分支井眼的布設位置準確無誤。不僅如此,溫和的研磨作業過程可最大限度降低對周圍地層的機械擾動,有利于保持地層的原始結構完整性。渦輪及井底鉆具組合的所有部件均采用耐溫材料制造,理論上可滿足井下高溫工況的作業要求。
材料與方法
井筒特征參數。 本次試驗改造井筒的結構設計如圖1所示。該井筒測量深度達1165英尺(355米)。其中,導管下入深度為69英尺(21米),表層套管下入深度為558英尺(170米)。生產套管下入至井底,并在目的層段設置兩段帶纜篩管濾水層,濾水層的井段范圍分別為592英尺(180.3米)至870英尺(265.3米)、1132英尺(345米)至1161英尺(354米);兩段濾水層之間的井段下入了5.5英寸套管。此外,生產套管的上段井段(從井口至第一段濾水層頂部592英尺/180.3米處)采用不銹鋼管材制成。
為確認井筒工況,作業前開展了井徑測井作業。此次測井的目的,是排查套管柱內是否存在縮徑段,避免在下入作業所需的斜向器(即前文所述的導向靴)時發生卡阻問題。測井結果顯示,井筒上段套管本體的內徑為5.2英寸(132毫米),套管接箍處內徑為4.9英寸(125毫米);井筒下段的內徑保持穩定,為4.94英寸(125.5毫米)。全井最小內徑為4.85英寸(123.3毫米),該縮徑段位于984英尺(300米)井深處。
哈爾特恩組地層的底部為粉砂質至細砂質沉積,其地層底界埋深約577英尺(176米)。在577英尺(176米)至863英尺(263米)井段,發育其下伏的雷克靈豪森組地層,該組地層以低滲透性固結砂巖為主,局部發育含裂縫的鈣質砂巖體。863英尺(263米)以深的井段為埃姆舍組的粉砂質—泥灰質泥巖,該地層一直延伸至2034英尺(620米)深處。依據德國標準化學會(1998)的分類標準,埃姆舍組地層的滲透性等級為極低滲透—近乎不透水,這一結論與文獻中關于埃姆舍組為低滲透、非導水層的描述一致。由于埃姆舍組地層通常具有較高的黏土含量,加之鉆井過程中產生的黏土涂抹效應,該地層內的斷層帶大多具備良好的水力封閉性。據耶格爾等人的研究,當埃姆舍組泥灰巖厚度達到330英尺(100米)及以上時,可作為高效隔水層。施特拉克邁爾將其描述為“近乎不透水的隔層”,并指出該地層巖體的導水系數范圍為
 室內試驗
室內試驗
蓋斯勒等人通過試驗證實,微型渦輪鉆井技術可成功應用于砂巖、花崗巖、石英巖等不同類型巖層的鉆進作業。經室內試驗與現場測試雙重驗證,該渦輪及配套鉆井系統的適用性得到了充分驗證。在馬爾市作業開展之前,行業內尚無針對目標地層——埃姆舍組泥灰巖的鉆進經驗。項目亟待明確的核心問題在于:黏土遇水后產生的膨脹特性,是否會導致鉆進過程中已鉆成的井眼再次閉合,以及是否會造成渦輪卡鉆事故。基于此,研究團隊決定開展先導鉆進試驗,旨在驗證該技術對埃姆舍組泥灰巖的適用性,并量化評估其作業效能。試驗所用巖樣為作業方提供的埃姆舍組泥灰巖巖芯,該巖芯直徑為0.39英寸(10厘米)、長度為3.3英尺(1 米)。為對質地疏松的巖芯試樣施加圍壓并保持其形態穩定,試驗人員將巖芯置入一根外徑為4.33英寸(110毫米)的聚氯乙烯(PVC)管內。該PVC管被固定在鋼制框架上,以此限制巖芯發生徑向與軸向位移。PVC 管前端加裝了一段金屬管,用于在鉆進過程中引導渦輪順利進入巖芯試樣。渦輪與一根可自由活動的柔性高壓軟管相連,且本次試驗采用的設備與后續現場作業的設備完全一致。
試驗最終取得了2英尺(0.6米)的鉆進深度,且全程僅耗時12分鐘,折算后機械鉆速可達9.84英尺/小時(3米/小時)。試驗過程中,渦輪的運行排量約為38.3加侖/分鐘(145升/分鐘),泵壓為5950磅/平方英寸(41兆帕);渦輪入口壓力約為1450磅/平方英寸(10兆帕),其余壓力損失均產生于供液管路中。鉆進過程中曾三次中斷作業,目的是檢查井眼狀態。第二次鉆進階段結束后的井眼形態如圖4所示。當鉆進深度達到2英尺(0.6米)、累計鉆進時間滿12分鐘時,由于渦輪開始鉆出聚氯乙烯(PVC)管并向側面鉆進,試驗隨即停止。研究人員在鉆進試驗期間及試驗結束后一周內持續觀察,確認黏土遇水后是否會發生膨脹。結果顯示,在此期間井眼直徑未出現明顯變化,且黏土膨脹對鉆進效率與工具操控性均未產生顯著影響。盡管本次試驗未開展長期監測,但推測井眼會隨時間推移逐漸閉合;不過鑒于這一閉合過程的速度足夠緩慢,因此認為黏土膨脹問題不會對后續現場作業造成影響。
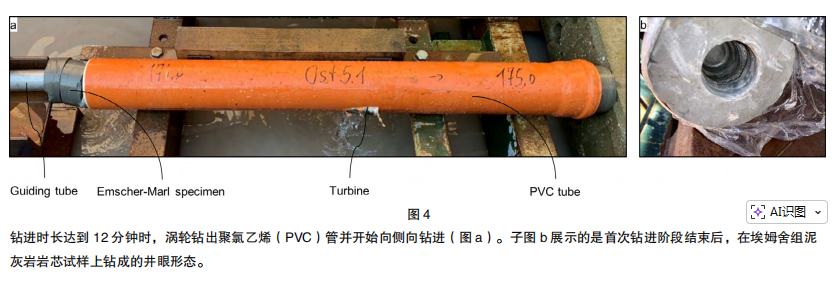
圖4鉆進時長達到12分鐘時,渦輪鉆出聚氯乙烯(PVC)管并開始向側向鉆進(圖a)。子圖b展示的是首次鉆進階段結束后,在埃姆舍組泥灰巖巖芯試樣上鉆成的井眼形態。
為驗證該渦輪技術的現場適用性,研究人員在模擬真實井筒幾何條件下開展了后續室內試驗(見圖5)。本次試驗的核心考察內容,是驗證套管銑削作業能否穩定可靠地實施。試驗選用一段規格為5.5英寸(14厘米)、單位長度重量15.50磅/英尺(23千克/米)的套管作為試樣,該套管與馬爾市二號井的實際下套管規格完全一致。試驗人員將這段長約 3.28英尺(1米)的套管注水泥封固后,垂直放置于試驗坑內。隨后,采用3.5英寸(9厘米)油管,從上方將一只導向靴下入套管試樣中;該導向靴外徑4.72英寸(12厘米),長度約1.3英尺(30厘米),出口處的偏轉角度為60°。試驗人員借助起重機,在油管入口上方懸掛了一個滑輪。渦輪與一根長約16.4英尺(5米)的柔性軟管相連,該柔性軟管另一端則與一根長1312英尺(400米)、外徑1英寸的軟管對接,且這根長軟管纏繞在軟管卷筒上。渦輪與整套軟管連接完成后,經油管下入井內,直至抵達導向靴的出口位置。試驗用一臺高壓三缸泵與軟管卷筒相連,通過該泵向軟管組合系統加壓,泵壓設定為約5947磅/平方英寸(41兆帕),排量設定為38.3加侖/分鐘(145升/分鐘),渦輪受流體驅動后,鉆進作業隨即啟動。

圖5 包含現場作業全部擬用設備的立式試驗裝置(圖a)。在由5.5英寸套管及環空注水泥構成的試樣中鉆成的微型側鉆分支井眼(圖b)。
試驗過程中,可通過渦輪運轉產生的聲響觀察鉆進進程,據此能夠區分銑削金屬套管與鉆進水泥環兩個階段的作業狀態。試驗人員全程觀察軟管的推進情況,并持續下放軟管以確保渦輪向前鉆進。渦輪鉆進45分鐘后,鉆進聲響的變化表明套管已被成功鉆穿——聲響頻率從高頻轉為低頻。與此同時,返排液變得渾濁,這一現象說明水泥環正被切削。約10秒后,渦輪鉆穿水泥環,部分機身露出水泥環外側,隨即完全貫出試樣。鉆穿作業完成后,試驗人員對渦輪能否順利回退至導向靴內進行了驗證。確認回退功能可靠后,將渦輪起出井內。本次試驗鉆成的微型側鉆分支井眼,井壁極為光滑,井眼直徑約為1.5英寸(3.8厘米),較渦輪自身直徑大0.08英寸(0.2厘米)。(未完待續)
新型微型渦輪鉆井技術現場試驗——從現有井筒穿套管鉆進至外圍黏土層施工微型分支井眼(下)
¨ 尼克拉斯?蓋斯勒
周頡/譯
鉆井現場布置
本次鉆井作業的場地總面積約為3767平方英尺(350平方米),場地四周設置圍欄封閉,以防止無關人員擅自進入(見圖 6)。作業團隊在二號井井口上方搭設了修井作業平臺,平臺上安裝轉盤,用于操控工作管柱。鉆井現場附近設有一口水源井,為作業提供用水。作業用水由一臺普通潛水泵從地下約65英尺(20米)深處抽取后輸送至現場,再泵入一個容積為18492加侖(70立方米)的儲水罐中,該儲水罐起到緩沖作用,可應對作業過程中的瞬時用水高峰。現場配備一臺柴油驅動的54馬力(40千瓦)發電機,保障電力供應。同時,在場地附近搭建了一間維修車間,用于開展設備檢修作業;作業控制系統則部署在集裝箱式辦公室內,實現遠程操控。
一臺額定載重15432磅(7000千克)的起重機被部署在作業現場的中心位置,用于下入和起升工作管柱,同時還承擔著在井口上方安裝滑輪的任務。為便于直觀了解現場布局,圖7展示了標注主要地面設備的作業現場俯視圖。一套電動軟管卷筒被安放在距離井口約30英尺(10米)的位置,卷筒上纏繞有1312英尺(400米)長的連續油管。一臺柴油驅動的335馬力(250千瓦)高壓三缸泵與該卷筒相連,通過這套裝置可向渦輪輸送高壓流體。井筒返排液先匯入鉆井液收集池,再經由兩臺分流器輸送至沉淀池。兩臺分流器分別安裝于工作管柱,以及從井筒伸出的表層套管上。現場配備了多種傳感器,用于監測地面設備的運行參數。在起重機吊鉤與滑輪之間安裝有一臺稱重傳感器(HBK型號1-RSCC3/2 T-1),可實時監測大鉤載荷;鉆頭鉆壓則通過所測大鉤載荷的變化量計算得出。在高壓泵與軟管卷筒之間的壓力管線上,安裝有超聲波流量計(基恩士 型號 FD-Q32C)和壓力傳感器(易福門 型號 PT5460),分別用于測量流體排量與壓力;壓力數據同時在泵頭處和卷筒入口處進行采集。在軟管收放裝置的排管器上,安裝有一臺計數器(庫伯勒 型號 8.KIH40.24CB.1024.0050),通過計量被放出的軟管長度,可換算得出連續油管井底鉆具組合的下入深度。

圖7 鉆井現場布置示意圖,清晰呈現了作業所用主要設備的布局:1發電機、2維修車間、3辦公室、4管材堆放架、5修井作業平臺、6高壓泵、7軟管收放裝置、8控制臺、9起重機、10衛生間、11沉淀池、12柴油罐。
鉆井作業流程
首先,借助起重機將導向靴井底鉆具組合(見圖8)下入井內。該鉆具組合的核心結構為導向靴,通過轉換接頭與工作管柱相連。作業選用的工作管柱為3.5英寸(9厘米)油管,單根油管長度為10英尺(3米),采用管鉗手工完成油管的對接上扣作業。技術人員通過統計下入油管的總根數計算管柱長度,以此確定導向靴的實際坐放深度。根據甲方要求,需在959英尺(292.4米)與1087英尺(331.4米)兩個目標井段,分別鉆設6條呈徑向分布的微型側鉆分支井眼。每個目標井段的6條分支井眼需按等角度分布,相鄰井眼的夾角約為60°(6×60°=360°),分支井眼的設計長度為1.5英尺(0.5米)至5英尺(1.5米)。當導向靴下至首個目標深度960英尺(292.4 米)時,技術人員利用轉盤將工作管柱順時針旋轉數圈,并進行上下活動,確保管柱處于拉直狀態,無松弛現象。隨后精確調整導向靴至設計坐放深度,將工作管柱懸掛在修井作業平臺的卡瓦上。

圖8 導向靴井底鉆具組合與工作管柱的連接實拍圖,渦輪鉆頭清晰可見于導向靴的出口位置。
裝配孕鑲金剛石鉆頭的渦輪,由連續油管輸送,經工作管柱下入井筒。下入過程中,技術人員需密切監測大鉤載荷與連續油管的狀態。在即將到達井底前,需降低下入速度。大鉤載荷出現驟降時,即表明渦輪已抵達導向靴出口,且鉆頭正接觸套管。渦輪下入期間,需提前啟動高壓泵,為鉆進作業做好準備。鉆頭接觸套管后,通過向渦輪加壓,正式啟動鉆進作業。本次作業全程采用清水作為鉆井液,鉆井液均為一次性使用,不進行循環回流。鉆進初期的啟動階段,泵壓設定為5950磅/平方英寸(410巴),排量設定為38加侖/分鐘(145升/分鐘);約3分鐘后,將排量降至32加侖/分鐘(120升/分鐘),泵壓調整為4350磅/平方英寸(300巴)。鉆進過程中需持續監測連續油管,并適時下放,確保管柱始終處于張緊狀態,無松弛現象。鉆進進度通過聲學監測與下放軟管長度計量兩種方式同步把控。從銑削套管到鉆進水泥環的階段轉換,可通過聲響頻率的變化進行定性判斷。
每完成一趟鉆進作業后,需下入攝像頭以驗證鉆進作業是否成功。為保證畫面清晰度,需先對井眼進行沖洗,清除巖屑雜質。在測量所鉆井眼長度(即微型側鉆分支井眼長度)時,將攝像頭從導向靴出口處下放至微型側鉆分支井眼井底,同時在地面計量玻璃纖維增強型攝像電纜的下放長度。當確認一條微型側鉆分支井眼鉆進成功后,將管柱順時針旋轉60°,使導向靴切換至下一個預設方位。導向靴的角度定位操作,是通過轉盤旋轉整個管柱來實現的;技術人員借助安裝在管柱上的圓形刻度盤,以及轉盤上的基準點,完成導向靴角度的精準設定。
本次作業的基本流程及各步驟的大致耗時,詳見表1。

待兩個目標井段的鉆進作業全部完成后,技術人員將導向靴井底鉆具組合起出井內,并隨即開展電纜測井作業。采用聲波井眼成像儀進行測井時,可根據聲波傳播時間同步計算井徑數據。該成像系統能夠針對每一深度層段生成一幅360°全景井眼圖像,且圖像會按照磁北方向進行標定顯示。此外,測井井底鉆具組合還配備了光學電視成像儀,用于進一步驗證測井結果的準確性。
結果與討論
在馬爾市作業現場,團隊按甲方要求成功鉆成12條微型側鉆分支井眼。表2匯總了所有已完成井眼的相關數據:除H2-4井眼長度為1英尺(0.3米)外,其余井眼長度介于2.5英尺(0.75米)至4.9英尺(1.5米)之間;剔除H2-4井眼后,微型側鉆分支井眼的平均長度(即平均鉆進深度)為3.6英尺(1.1米)。在鉆進H2-4井眼的過程中,出現了鉆頭部件脫落的情況,脫落部件滯留于井眼內。考慮到存在落魚卡鉆的風險,項目團隊決定停止該井眼的鉆進作業。若要使所有微型側鉆分支井眼的長度保持更穩定的一致性,需配備一套實時測量系統,在鉆進過程中追蹤當前井眼長度,并在鉆至目標深度時發出停鉆指示。但本次作業并未采用該類系統,而是在每趟鉆進作業完成后,通過攝像頭往返探測井眼末端的方式估算井眼長度。回收攝像頭時,可借助攝像電纜的張力讀數,結合電纜的拉伸量與彎曲量計算井眼長度,該方法與常規電纜測井的深度測量原理一致。完成單條微型側鉆分支井眼的鉆進與驗收作業,平均耗時為100-120分鐘。其中,單條井眼的套管銑削階段耗時約45分鐘,最高占單井總鉆進時長的75%。
表2 已鉆微型側鉆分支井眼清單(含方位及長度參數)

鉆進作業過程中及作業完成后,可通過多項指標驗證鉆進是否成功。鉆進期間,觀察返排液的狀態可知:清水鉆井液的清澈度會隨巖屑含量的變化而改變,呈現出從澄清到渾濁的不同狀態。由于渦輪鉆井采用研磨式破巖工藝,巖屑極易被攜帶至地面,因此只要地面返排液出現渾濁,即可判定井下鉆進作業已順利進行。但需要注意的是,受環空返排通道尺寸及32加侖/分鐘(120升/分鐘)鉆井液排量的影響,巖屑從井下運移至地面存在約20分鐘的延遲時間。與常規鉆井的泥漿錄井類似,圖9a展示的是渦輪鉆進期間從返排液中采集的流體樣本。待巖屑沉降后,甲方對其進行了檢測分析,確認巖屑為泥灰巖碎屑,這一結果既證實了套管銑削、水泥環鉆穿作業的完成,也表明泥灰巖地層鉆進取得了成功。此外,如圖9b所示,鉆進過程中產生的巖屑會被收集在渦輪內置的專用取樣器中。巖屑的精細程度肉眼可清晰辨識,這正是前文《引言》部分所闡述的研磨式破巖機理帶來的結果。此處的“收集器”本質上是鉆頭與渦輪葉輪之間的一個空腔,該空腔直徑約為1英寸(2.5厘米),長度約為0.27英寸(0.7厘米)。在室內鉆井試驗中,研究人員發現部分被鉆碎的巖屑會滯留在這個空腔內,這一現象屬于偶然發現。需要說明的是,目前尚未針對該現象開展專項試驗研究,但它仍可作為判斷井下是否發生鉆進行為的一項重要指標。渦輪起出至地面后,技術人員對收集器內的巖屑進行了取樣分析。通過分析收集器中留存的巖屑樣本(可能為鋼質套管碎屑、水泥環碎屑及/或泥灰巖地層碎屑),即可推斷出井下鉆進作業是否銑削了套管、鉆穿了水泥環及/或鉆進了目的地層。

圖9 (a) 鉆進期間采集的返排液樣本,容器底部可見沉降的巖屑。(b) 收集腔內部留存的埃姆舍組泥灰巖巖屑。
本次作業的一項突出挑戰,來自5.5英寸(14厘米)小直徑套管的限制——受套管尺寸影響,導向靴能夠為渦輪提供的最大造斜傾角僅為45°。在 45°傾角下銑削套管時,由于鉆頭同時承受水平與垂直方向的復合載荷,作業難度顯著提升。我們推測,當鉆頭鉆壓過大時,會引發鉆頭卡停現象。一旦出現鉆頭卡停,需將渦輪上提至導向靴上方,在完全卸除鉆壓、扭矩及摩阻的狀態下重新下放,這一操作與常規鉆井中的離井底旋轉工藝原理一致。在部分情況下,上提渦輪初期會出現卡阻現象,這一狀態可通過大鉤載荷的上升趨勢判定。套管被鉆穿后形成的不規則孔緣,被認為是導致渦輪初期卡阻的主要原因。針對此類情況,可通過反復上下活動渦輪的方式解除卡阻,使其恢復正常運行。
作業期間,現場采用聲學測量系統對渦輪的鉆進噪聲進行監測。具體操作方式為:在地面將一個聲學傳感器夾持于工作管柱上,利用該傳感器采集渦輪運轉產生的聲學信號。本次監測選用的設備為高靈敏度加速度計(PCB型號 JTLD35C33),該儀器的頻率響應范圍為0.5赫茲至10千赫茲,可有效捕捉與渦輪運轉相關的各類振動信號。傳感器采集的信號經處理后,會實時傳輸至耳機并播放給司鉆。司鉆可根據聲學信號的特征判斷渦輪的運行狀態,并區分當前鉆進對象是鋼質套管、水泥環還是基巖。這種判斷方式完全基于地面微型渦輪鉆井系統大量室內試驗積累的實操經驗。驗證鉆進作業是否成功的最可靠方法,是在作業完成后采用微井眼攝像頭對微型側鉆分支井眼進行目視檢測(見圖10a)。圖10b展示的是一條鉆進成功的微型側鉆分支井眼圖像:井眼內壁呈現的灰褐色,明確表明已鉆入埃姆舍組泥灰巖地層;在圖像右下角,還可見到套管銑削作業產生的銀白色鋼屑。盡管現場已進行了長時間的循環沖洗,但殘留在微型側鉆分支井眼內的巖屑,仍對攝像頭的觀測視野造成了一定影響。

圖10 (a) 采用微井眼攝像頭對微型側鉆分支井眼開展目視檢測。(b) 某條微型側鉆分支井眼入口處的成像圖,可見井眼已成功鉆入埃姆舍組泥灰巖地層。
鉆進作業全部完成后,技術人員采用ALT公司的QL40型電纜測井系統開展補充評價。該測井儀器串由電纜頭、測斜單元、聲波井眼成像儀(ABI)及光學井眼成像儀組成,測井成果如圖11所示。微型側鉆分支井眼的理論直徑估算值約為1.4英寸(3.6厘米),對應聲波井眼成像儀圖像中的12個像素。由于井眼內下入有鋼質套管,磁力儀受到干擾,無法確定磁北極方向。因此,微型側鉆分支井眼的位置僅能依據深度及井眼間的相對位置進行標定,無法獲取其相對真北方向的方位信息。層位1的6條微型側鉆分支井眼,深度介于963.71英尺(293.74米)至963.81英尺(293.77米)之間,這意味著在井筒軸向方向上,井眼之間的間距不超過0.098英尺(3厘米)。層位2的井眼深度范圍為1091.7英尺(332.75米)至1091.86英尺(332.8米),井眼軸向最大間距為0.23英尺(7厘米)。所有井眼呈現出極為規整的旋轉方位分布形態,相鄰井眼之間60° 的設計夾角得到了充分保證,且未出現任何井眼交叉重疊的情況。在本作業這種淺井、直井的工況下,通過地面操控工作管柱旋轉導向靴的方法,應用效果十分理想。但在深井作業中,尤其是在定向井工況下,若要將導向靴精準旋轉至預設方位,很可能需要采用其他作業方案。

圖11 兩個目標井段的測井成果圖:左側為經處理的聲波井眼成像儀(ABI)圖像(含振幅曲線、井徑曲線及推導井徑數據),右側為光學井眼成像儀采集的真彩色RGB圖像。
結論
本研究首次形成了5.5英寸套管內泥灰巖地層微型渦輪鉆井技術的現場應用文獻記錄。本次現場作業證實,當固井作業失效時,可采用微型渦輪鉆井技術重建井筒與目的層的連通通道。
通過鉆成的12條微型側鉆分支井眼,該渦輪技術成功恢復了井筒與目的泥灰巖地層間的水力連通性,保障了原計劃的井筒測試作業得以開展。這些平均深度達1米的大直徑微型側鉆分支井眼,有效延伸至井筒近井地帶,不僅擴大了井筒的泄流面積,同時也等效增大了井筒有效直徑。
微型側鉆分支井眼的鉆進過程采用兩種方式監測:一是通過聲學測量技術,實時判斷鉆進對象為套管、水泥環或地層;二是通過返排液巖屑分析,由甲方完成巖屑成分的識別。此外,利用攝像頭下入井眼的方式,可實現微型側鉆分支井眼長度的測量。補充測井作業明確了套管內各分支井眼起始位置的間距,清晰呈現出井眼的精確深度及方位分布規律。
本次作業驗證了:通過鉆設定向微型側鉆分支井眼,微型渦輪鉆井技術能夠為井筒與地層建立更優質的水力連通通道。因此,未來在水力連通性受限或傳統射孔工藝難以實施的場景中,應用該技術具備充分的可行性。憑借可鉆穿鋼質套管的獨特優勢,微型渦輪鉆井技術有望成為完井領域的一項新興技術。需說明的是,該技術存在鉆進深度有限、井下參數測量能力不足的局限性,因此不宜與定向鉆井技術進行類比。
總體而言,微型渦輪鉆井技術可高精度定位、定角鉆設毫米級微型側鉆分支井眼。通過機械方式形成的微通道,不僅能減少鉆井液與支撐劑的用量、降低裂縫無序延伸的風險,還可支持開展直接的原位水力測試(如垂向滲透率剖面測試)。
基于傳感器的控制手段(監測轉速、軸向力、聲發射等參數),能夠確保作業過程的高可控性與重復性。該技術尤其適用于硬質、脆性或非均質地層——此類地層往往會限制水力噴射或高壓壓裂等工藝的應用效果。
本研究可視為一項概念驗證成果,已充分展現出該技術的諸多潛在優勢。相較于常規增產改造工藝(如泵送橋塞射孔聯作工藝),微型渦輪鉆井技術的成本優勢源于作業耗時縮短與所需設備精簡兩方面。同時,該技術還能規避常規工藝的諸多弊端,例如:反復射孔、壓裂泵送與設備換裝導致的作業時長偏長、鉆機占用時間久;泵組部署、壓裂液暫存、支撐劑處理等環節帶來的高物流與作業投入;射孔引發的近井地帶傷害(如巖石破碎帶、射孔殘渣/污染雜質殘留);爆炸器材運輸與許可審批、現場操作等環節存在的安全風險;以及對裂縫形

 微信公眾號
微信公眾號
 微信視頻號
微信視頻號





 京公網安備11010502053156號
京公網安備11010502053156號